En esta preparación previa a la competencia seguimos con la misma distribución de roles para optimizar el trabajo, dividiéndonos en tres grupos, el primero es el grupo los programadores los cuales se encargan de realizar toda la parte del manejo interno y software del robot, el segundo grupo es el equipo de mecánica el cual crea todos los mecanismos que serán implementados para el cumplimiento de los retos, además de la estructura principal, componentes esenciales y accesorios. Y por último el equipo de diseño que cumple con plasmar el robot en el programa LEGO DIGITAL DESIGNER, para así mantener una bitácora de la construcción del robot.
Nuestro mayor reto para esta competencia nacional es mejorar el desempeño del robot en la pista, mejoramos su rendimiento aplicando más conocimientos adquiridos en el colegio, tales como física, geometría y matemáticas. Nos ayudamos de la experiencia adquirida en la anterior presentación, para tener más claros los conceptos de transmisión de movimientos, centro de gravedad, simetría, punto de apoyo, etc. Esta vez disfrutamos aún más de este proceso, pues nos impusimos nuevos y difíciles retos, pero con dedicación logramos alcanzarlos.
El equipo a lo largo del proceso, ha encontrado dificultades a la hora de programar y conformar la estructura final de todo lo que se quiere lograr con el robot, una de esta dificultades es la poca cantidad de fichas con las se cuenta para crearlo, puesto que no se tiene la posibilidad de obtener más o las suficientes fichas para cumplir con los objetivos planeados; también en la parte de los recursos, se ha impedido el alcance de un proceso optimo, por la falta de baterías para el robot lo que causa que la parte de programación varíe y distorsione las acciones en la pista; lo que ha ido retardando el alcance de las metas. Destacamos que aun así el equipo no se rinde y le ha sacado el máximo provecho a cada una de las fichas que se emplean en el robot, porque aunque se tengan pocos recursos, es mucho lo que se puede hacer si se posee perseverancia y una meta fija.
INNOVACIÓN
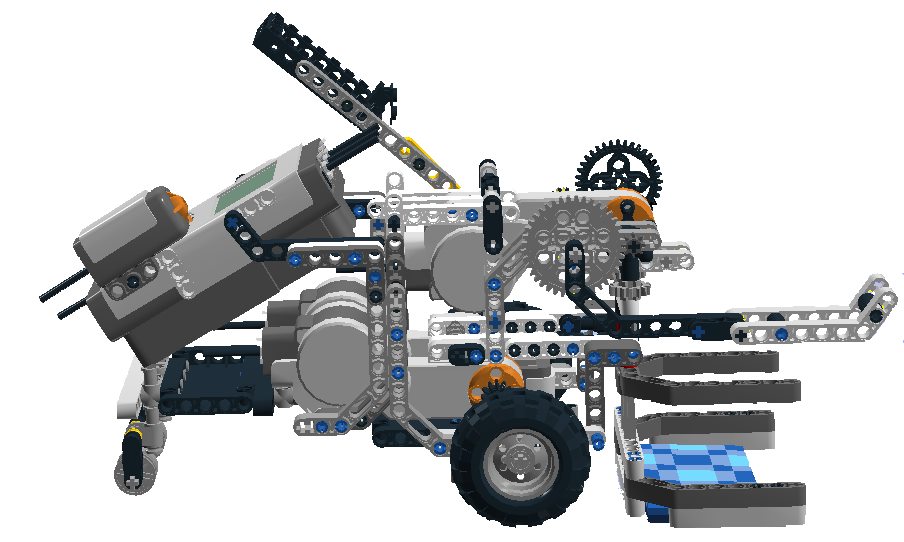
En el proceso de construcción del robot se realizaron varias pruebas para optimizar el desempeño de este en la pista, para esto se realizado una amplificación de velocidad por medio de engranajes de manera que se pueda aumentar la eficacia y mejorar el desempeño de este, sin embargo, esta adecuación género que el robot tuviera poca precisión y maniobrabilidad.
Para dar solución a este problema decidimos ubicarlos de manera inversa, ya que así el robot posee más fuerza y se disminuye su velocidad, de manera que el robot pueda tener una mejor precisión y maniobrabilidad. Además se implementó un tren engranajes para obtener movimientos simultáneos y así mejorar la eficiencia a la hora de realizar los retos.
PROGRAMACIÓN
Para la programación del robot se utilizó el software llamado Mindstorms NxT en el cual se usaron modelos lógico-matemáticos con variables y constantes para lograr un desempeño más eficiente del robot dependiendo las variaciones de la pista a la hora de la competencia, también se utilizaron My Blocks para realizar movimientos que son constantes en la programación como giros, entre otras.
En una de las programaciones se utiliza un controlador proporcional para seguir la línea usando un solo sensor de luz, para esto se realiza de calibración para medir la intensidad de luz en la competencia y sacar un promedio y así limitar un borde entre la línea negra y la línea blanca, después de esto se realiza un ciclo constante para medir la luz actual y así determinar un error, lo que hace el control proporcional es tomar el error y mediante lógica manipular la potencia de los motores haciendo que el robot se ubique fácilmente en el borde de la línea.



.jpg)

.jpg)
.jpg)
